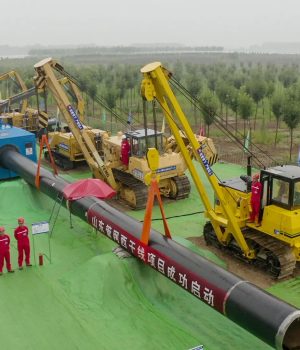
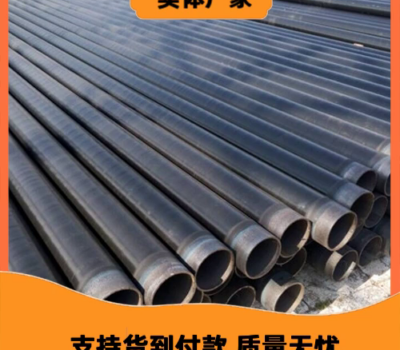
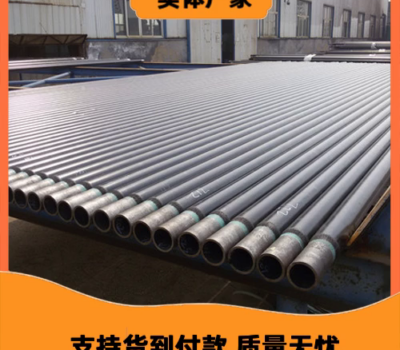
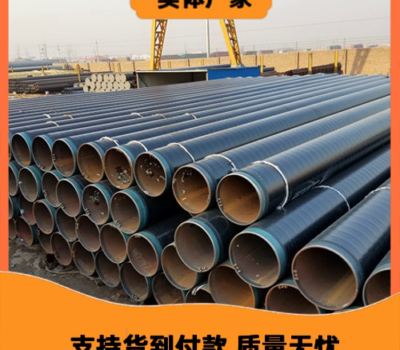
临汾E防腐管道埋地燃气防腐钢管制造工厂这正是我继续前进的zui大动力

不同控制方式下位置伺服系统的阶跃响应系统仅采用了PID调节控制的实验结果,由于在位置附近控制器输出量较小,常使阀工作在死区内,当阀工作在死区时,液压缸停止运动,直到由于误差积分作用使控制器输出量超出死区,阀又突然开启,缸又加速运动,通常会引起大的超调,振荡、过渡时间长,控制精度低。在阶段采用模糊控制器,控制器的输出可以快速补偿阀死区非线性,有效克服死区的影响,提高控制精度,见图4b。系统对方波输入信号的响应实验曲线见图5。
专注于自动化设备的研发与创造
15132713777
15132713777
联系人:王经理
电 话:151-3271-3777
传 真:0317-6288168
地 址:盐山经济开发区蒲洼城园区
发布者:czyq666.com 时间:2024-05-27
临汾E防腐管道埋地燃气防腐钢管制造工厂这正是我继续前进的zui大动力
不同控制方式下位置伺服系统的阶跃响应系统仅采用了PID调节控制的实验结果,由于在位置附近控制器输出量较小,常使阀工作在死区内,当阀工作在死区时,液压缸停止运动,直到由于误差积分作用使控制器输出量超出死区,阀又突然开启,缸又加速运动,通常会引起大的超调,振荡、过渡时间长,控制精度低。在阶段采用模糊控制器,控制器的输出可以快速补偿阀死区非线性,有效克服死区的影响,提高控制精度,见图4b。系统对方波输入信号的响应实验曲线见图5。
本文版权归沧州亿擎管道有限公司所有;本文共被查询37次。
当前页面链接:https://www.czyq666.com/11946/html
未经授权,禁止任何站点镜像、采集、或复制本站内容,我们将通过法律途径维权到底!
Related articles

anli
版权所有 ©Copyright © 2017-2020 沧州亿擎管道有限公司 冀ICP备19001138号-3 ![]() 冀公网安备13092502002207号 Sitemap
冀公网安备13092502002207号 Sitemap